Popular Article : KINECT by Microsoft
May 4th, 2015 Posted 4:30 am
Dikembangkan oleh Microsoft, Kinect adalah perangkat tambahan yang memanfaatkan teknologi kamera untuk mendeteksi gerakan dan perintah suara (motion and voice recognition) pada game console (xbox 360, xbox one, dan Windows PC) sehingga pengguna dapat berinteraksi dengan console-nya tanpa menggunakan controller1. Penelitian dengan biaya jutaan dolar ini pada awalnya dinamakan Project Natal. Kinect merupakan sensor berbentuk batang horizontal yang tersambung dengan poros bermotor dan didesain agar dapat diletakkan tepat di atas display video. Software Kinect dikembangkan oleh anak perusahaan Microsoft, Rare, sedangkan untuk teknologi kameranya (yang menggunakan proyeksi sinar infrared dan microchip untuk mendeteksi pergerakan dalam 3D) dikembangkan oleh PrimeSense. Microsoft merilis Kinect Software Development Kit untuk Windows 7 bagi para programmer untuk membuat aplikasi nonkomersial yang memanfaatkan teknologi Kinect dalam bahasa C++/CLI, C#, atau Visual Basic .NET (dengan menggunakan Microsoft Visual Studio 2010) pada 16 Juni 2011. Pada tahun berikutnya, Microsoft merilis versi komersial dari Kinect Windows SDK.
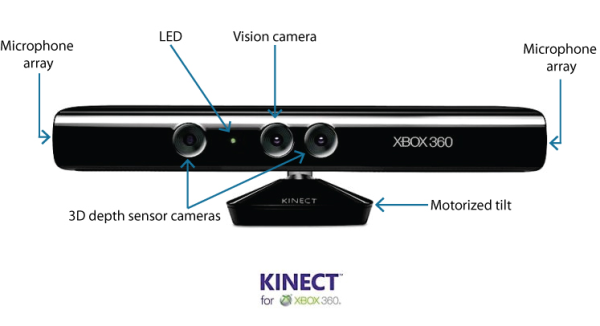
Perangkat ini terdiri dari RGB camera, 3D Depth Sensor, dan multi array mic untuk dapat menangkap gerakan, suara, dan wajah (motion, voice, and facial recognition). Depth sensor terdiri dari proyektor laser infrared dan CMOS sensor yang dapat mendeteksi lingkungan dalam 3D dengan kondisi pencahayaan apapun. Fitur kunci dari Kinect versi terbaru antara lain2 :
- improved body tracking (dapat mendeteksi 6 skeleton komplit dan 25 joint per orang)
- depth sensing (512 x 424, 30 Hz, FOV : 70 x 60, one mode : 0.5 – 4.5 meter)
- 1080p color camera (30 Hz / 15 Hz pada pencahayaan redup)
- New active infrared (IR) capabilities (512 x 424, 30 Hz)
- Wider/expanded field of view
Dalam menentukan posisi pemain, Kinect menggunakan proses dengan dua tahap yakni menghitung depth map (menggunakan structured light) lalu menentukan posisi tubuh (dengan machine learning)3.
Depth map dibuat dengan menganalisa pola titik-titik dari sinar laser infrared yang dipancarkan Kinect. Teknik untuk menganalisa pattern yang diketahui disebut structured light yang dikombinasikan dengan dua teknik computer vision yakni depth from focus dan depth from stereo. Depth from focus menggunakan prinsip bahwa semakin jauh objek maka semakin kabur (blur). Depth from stereo menggunakan prinsip parallax di mana bila kita melihat suatu pemandangan (sambil bergerak) dari sudut yang berbeda, objek yang dekat dengan pengamat akan tampak lebih tergeser ke suatu sisi dibanding objek yang jauh. Kinect menganalisa pergeseran pola titik dengan memproyeksi dari satu lokasi dan mengamati dari lokasi lainnya.
Tahap kedua adalah bagian tubuh dideteksi menggunakan randomized decision forest (memilih acak dari 2000 pertanyaan yang tersedia dan mempelajari beberapa tree sekaligus) yang dipelajari dari lebih dari satu juta contoh training. Tahap ini terbagi lagi menjadi dua sub tahap yakni mengubah depth image menjadi body part image lalu mengubahnya menjadi skeleton (menggunakan mean shift algorithm). Untuk membuat hasilnya lebih baik, maka skeleton yang buruk ditolak dan skeleton yang baik diterima (berdasarkan hasil training).
Teknologi Kinect ini juga memanfaatkan ilmu matematika antara lain probabilitas dan statistika, kalkulus multivariabel, aljabar linear, analisis kompleks, kombinatorik, algoritma graf, geometri, persamaan diferensial, dan topologi.
Salah satu isu yang menarik dengan hadirnya Kinect adalah bahwa Kinect dikatakan dapat mendeteksi hadirnya makhluk halus seperti hantu4. Isu ini muncul dari pengalaman beberapa pengguna Kinect yang menyatakan bahwa Kinect mendeteksi hal lain ketika pemain sedang sendirian di dalam ruangan. Meski Microsoft tidak memberikan komentar tentang hal ini, para paranormal mulai bereksperimen dengan kemungkinan penggunaan Kinect untuk mendeteksi kehadiran “makhluk lain” tersebut.
Kegunaan alternatif lainnya dari Kinect yang dikembangkan oleh Brunel University London adalah untuk membantu mengatasi salah satu gejala yang dialami oleh penderita penyakit Parkinson yaitu FOG (Freezing of Gait)5. FOG adalah suatu gejala ketika otot penderita kaku (freeze) sehingga mereka tidak dapat bergerak atau terjatuh. Hal ini dapat diatasi dengan memproyeksikan sinar berupa garis ke lantai oleh Kinect yang dipasang di sekeliling rumah sehingga otot dapat kembali bekerja atau memicu voice-conferencing call saat mendeteksi penderita terjatuh.
Masih banyak pihak lain yang berusaha untuk memanfaatkan teknologi Kinect lebih dari tujuan asalnya yakni untuk bermain, antara lain untuk mengontrol web browser dengan gerakan tangan, mendeteksi gejala autisme pada anak dan OCD, membantu penggambaran saat melakukan operasi kanker, dan bermain piano dengan menggerakkan tangan pada meja.
- Sumber literatur :
1 Wikipedia. 2015. Kinect. http://en.wikipedia.org/wiki/Kinect.
2Microsoft. 2015. Kinect For Windows Feature.
https://www.microsoft.com/enus/kinectforwindows/meetkinect/features.aspx
3http://www.cs.bham.ac.uk/~vvk201/Teach/Graphics/kinect.pdf
4Corriea, Alexa Ray. 2014. Ghosts in The Machine? Using the Kinect to Hunt The Spirits.
http://www.polygon.com/halloween/2014/10/30/7079943/kinect-ghost-hunting
5Pritchard, Tom. 2015. A Hacked Kinect Can Help Counter Parkinson’s Symptoms.
http://www.gizmodo.co.uk/2015/05/a-hacked-kinect-can-help-counter-parkinsons-symptoms/
Posted in Uncategorized